בית > יישומים הנדסים > שיקולים בבחירת מגבר (דרייבר)
שיקולים בבחירת מגבר (דרייבר)
מגברים (דרייברים) מהווים חלק חשוב ממערכות בקרה והינע, ומשמשים כחולייה המקשרת בין בקרי התנועה (Motion Controllers/PLCs) ליחידות ההנעה. מטרתם של המגברים היא להמיר אותות דיגיטליים או אנלוגיים ברמות נמוכות — שמגיעים מבקרה עילית כלשהי — לאנרגיה בדמות זרם ומתח שנחוצים להפעלת מערכות ממונעות.
במערכות בקרת הינע, בקר התנועה מחשב ומגדיר את אופן פעולת המערכת, ושולח אותות למגבר אשר יודע לתרגמן למתחים וזרמים הדרושים בכדי להאיץ או להאיט את המנועים תוך התחשבות בעומס. ניתן לדמיין את הבקר כ"מוח" של המערכת, ואת המגבר כ"שריר" אשר מתרגם את הפקודות לכוח פיזי.
בשוק המגברים קיימות טכנולוגיות שונות שמשמשות להנעת מנועי DC מברשות (Brush), מנועים חסרי מברשות (Brushless), מנועי AC סרוו, ומנועי צעד. כתבה זו תתרכז במגברי סרוו (Servo Amplifiers).
חשוב תחילה להבין מהי ההגדרה של "סרוו". כשמדברים על מערכת סרוו אנחנו בעצם מדברים על אופן הפעולה של המערכת — מערכת זו מסוגלת לגשש ולנתח את פעולתה בזמן אמת, להשוות אותה לסט הפקודות שנתבקשה לבצע, ולתקן במידת הצורך. המגבר כאמור לוקח חלק חשוב בפעילות זו על ידי תרגום פקודותיו המתמשכות של הבקר לאנרגיה פרופורציונלית וחיונית להנעת המנועים.
מגברי הסרוו מתחלקים לשתי קבוצות עיקריות: מגברים ליניאריים ומגברים ממותגים. מגברים ליניאריים מאופיינים כבעלי פונקציית מעבר קבועה, ומגבירים את אותות הכניסה בצורה ליניארית ולא משתנה. מכיוון שאופי המרת האותות במגברים הליניאריים מותנה בשימוש בטרנזיסטורים, הם ידועים בנטייתם להתחממות. פיזור החום של אנרגיה שלא נוצלה על ידי המנוע מוביל להתחממות כללית של המגבר כולו (נהוג לראות צלעות קירור או מאווררים במגברים אלו). בנוסף לכך, הם גם בעלי נצילות נמוכה יחסית, וגודלם גדול יותר ממגברים ממותגים. לעומת זאת, היתרון המשמעותי ביותר שלהם הוא הרעש החשמלי הכמעט אפסי שמפיקים בזמן פעולתם — מסיבה זו הם נוטים להיות שימושיים מאד בסביבות שרגישות לתנודות חשמליות.
**שיקולים בבחירת מגבר**
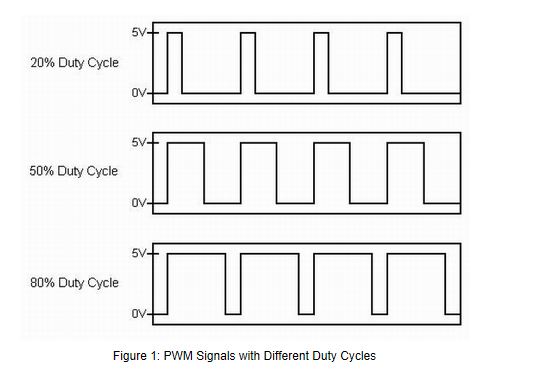
מגברים ממותגים בעולם הבקרה מסתמכים בעיקר על שיטת Pulse Width Modulation (אפנון רוחב פולס או PWM). ה-PWM מנצל את זמן התגובה המכני האיטי יחסית של המנוע, ובתחכום רב תורם להנמכה משמעותית של פיזור החום תוך העלאת הנצילות הכללית של המערכת.
המתח מסופק למנוע בין שתי נקודות מתח (גבוהה ונמוכה) בצורת פולסים בתדירות גבוהה, בדרך כלל בין 20-60kHz. בתדירות נמוכה המנוע היה מנסה להאיץ ולהאיט עם כל פולס, אך מכיוון שהתדירות כה גבוהה וזמן התגובה המכני ארוך, המתח הממוצע שנוצר לאורך תהליך המודולציה הוא למעשה המתח האפקטיבי שאליו מגיב המנוע.
הקו הממוצע שבין נקודות המתחים הוא זה שצריך להשתנות בכדי לשנות את אופן תנועת המנוע (המהירות למשל). שינוי המתח הממוצע נעשה על ידי שינוי רוחב הפולס — פרק זמן קצר או ארוך יותר באחת משתי נקודות המתח. שיטת עבודה זו תורמת לכך שהתחממות הטרנזיסטורים קטנה, ובכך המגבר הממותג עובד בטמפרטורות נמוכות יותר (ויכול גם להיות קטן יותר פיזית).
יש להיזהר בשימוש עם מנועים בעלי השראות נמוכה, אשר יכולים להגיב לשינויי המתח של ה-PWM עם עליות ונפילות חדות של זרם. דבר זה עלול לחמם את המנוע במהירות ואף לפגוע בסליל. עם מנועים כאלו מומלץ להגביר את ההשראות במערכת על ידי הוספת משנק (Choke) חיצוני למעגל, שינמיך את תגובת הזרם.

ישנו כיום טשטוש בגבול שבין מגברי הסרוו לבקרי התנועה, כאשר הדרייברים הדיגיטליים מסוגלים לבצע בקרת מיצוב תוך סגירת החוג על ידי אותות של אנקודרים, רזולברים ושאר טכנולוגיות המשוב (Feedback). לעומתם, המגברים האנלוגיים מסוגלים לעבוד במספר מצבים ייחודיים.
במערכת עם בקר תנועה, מגברים אנלוגיים יכולים לעבוד ב־Torque/Current mode — מצב שבו הם מייצרים קו זרם פרופורציונלי שנקבע על פי אות המתח ששולח הבקר (למשל ±10V), ובכך יוצרים מומנט קבוע במערכת. מצב פעולה נוסף נותן מענה לבקרת מהירות.
מגברי סרוו יכולים לעבוד במערכת כגוף ה"בקרה" היחיד על ידי סגירת חוג המהירות ללא צורך בבקר חיצוני. בקרת המהירות יכולה להיעשות באחת מכמה שיטות: שימוש באנקודר במשוב של טאכומטר, קריאת ה־Back EMF, או באמצעות IR Compensation.
מעבר לבקרת מיצוב, הדרייברים הדיגיטליים שגישרו על הפער שבין מגברים לבקרים הפכו לעמידים ופשוטים יותר לשימוש, והם מאפשרים תכנות וכיול נוחים בהרבה בהשוואה לאלו האנלוגיים. משובי המיקום והמהירות מבוססים בדרך כלל על האנקודר במערכת, והקונפיגורציה נעשית בקלות דרך מגוון רחב של סוגי תקשורת (RS232 / RS485 / Ethernet וכו'), המספקת גישה נוחה לשינוי פרמטרים במערכת.
ישנם דרייברים דיגיטליים שמסוגלים אף לבצע כיול אוטומטי של המנוע. כיום קיימים בשוק גם מנועי סרוו מוכללים (Integrated Servo Motors) — מנועים שבהם המגבר הדיגיטלי מובנה בתוך גוף המנוע עצמו, ובכך נחסכים מקום, חיווט ותקלות פוטנציאליות.
מגברי סרוו נמדדים בדרך כלל על פי יכולות אספקת הזרם ההמשכי והמירבי (Continuous / Peak Current), טווח המתח, מינימום ההשראות של המנוע איתו הם יכולים לעבוד (mH), תדירות המיתוג ופס הרוחב (KHz). מומלץ לאמת בקפידה את נתוני המגבר מול דרישות המנוע במערכת — תאוצות חדות של המנוע עשויות להוביל את המגבר לטווח ה־Peak, וברוב המקרים פעולה בתחום זה מעבר לשתי שניות עלולה לגרום לכשל. לכן, בעת בחירת מגבר מומלץ לבחור אחד בעל Peak Current גבוה יותר מהזרם המרבי שצורך המנוע.
לסיכום: בבחירת מגברי סרוו יש לבדוק
- סוג המנועים להנעה (Brush / Brushless / Step)
- ההספק החשמלי הנדרש
- מצבי פעולה (סגירת חוג מהירות, מיצוב, Torque Mode וכו')
- יכולת קבלת פקודות מהבקר (Encoder Following, PWM, Step & Direction וכו')
- סוג התקשורת עם הבקרה העילית (RS / Ethernet / EtherCAT וכו')
- מספר כניסות ויציאות I/O
- סוגי המשוב הנתמכים (אנקודר, רזולבר, טאכומטר וכו')
- בחירה בין מגבר ליניארי למגבר ממותג PWM לפי צרכי המערכת ותנאי הסביבה
**הערה: ראו מאמר באתר של חברת ACS שהצליחה להביא את רמת הרעש של מגבר ממותג לרמה של מגבר לינארי.
